
[PRML] Ch 1.2 Probability Theory
업데이트:
This post is summary of the book Pattern Recognition and Machine Learning by Christopher M. Bishop
A lot of explanations in this page has been quoted from the book directly because most of the content is about definitions used in probability theory
1.2 Probability Theory
- Uncertainty is a key concept in the field of pattern recognition
- uncertainty arises through:
- noise on measurements
- finite size of data sets
- Probability Theory provides:
- a consistent framework for quantification and manipulation of uncertainty
- forms one of the central foundations for pattern recognition
- when probability theory is combined with Decision Theory:
- allows us to make optimal predictions given all the information available to us
- the information provided may be incomplete or ambiguous
- will be discussed in Section 1.5
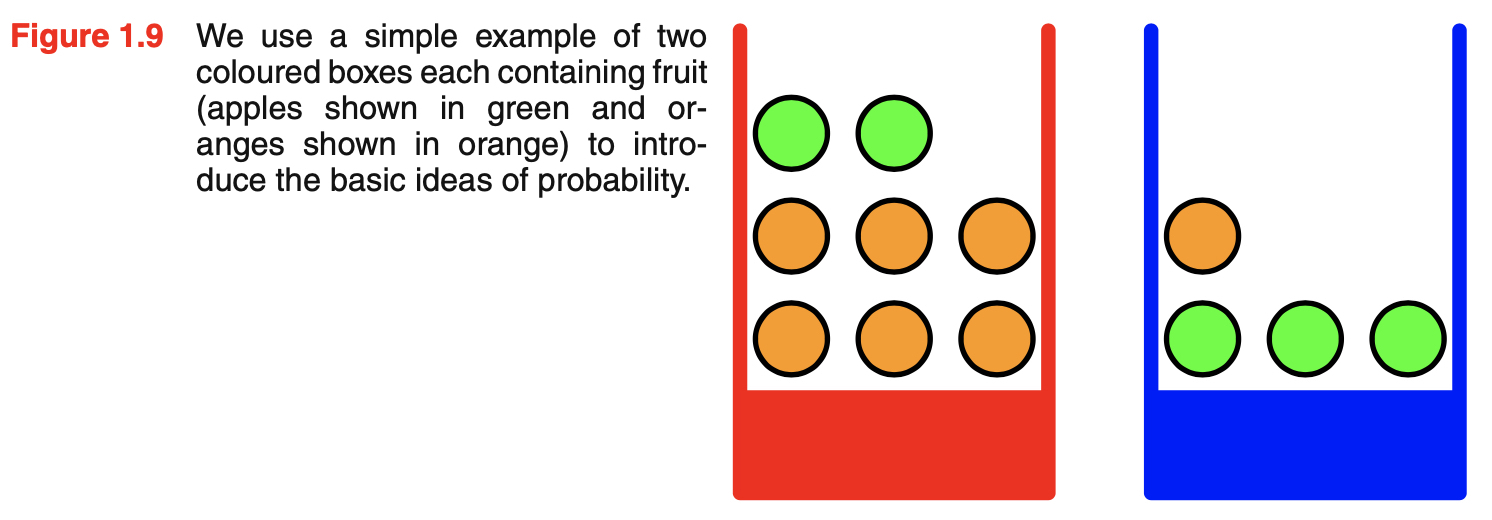
Example: apple and oranges
- two boxes of fruits from which an item of fruit is randomly selected and replaced
- suppose this process is repeated many times
- equally likely to select any of the pieces of fruit in the box
- red box:
- 2 apples and 6 oranges
- 40% of the time pick red box
- blue box:
- 3 apples and 1 orange
- 60% of the time pick blue box
- random variables:
- identity of the box:
- denoted by B
- possible values:
- r: red box
- b: blue box
- identity of the fruit
- denoted by F
- possible values:
- a: apple
- o: orange
- identity of the box:
- probabilities of incidents:
- probability of selecting the red box
- $P(B = r) = \frac{4}{10}$
- probability of selectinb the blue box
- $P(B = b) = \frac{6}{10}$
- probability of selecting the red box
- probabilities must lie in the interval [0,1] by definition
- the sum of probabilities of mutually exclusive events that include all possible outcomes must be one
- in this example, the chosen box must be either red or blue
- $P(B) = P(B = r) + P(B = b) = 1$
The Rules of Probability
- two elementary rules of probability are sum rule and product rule
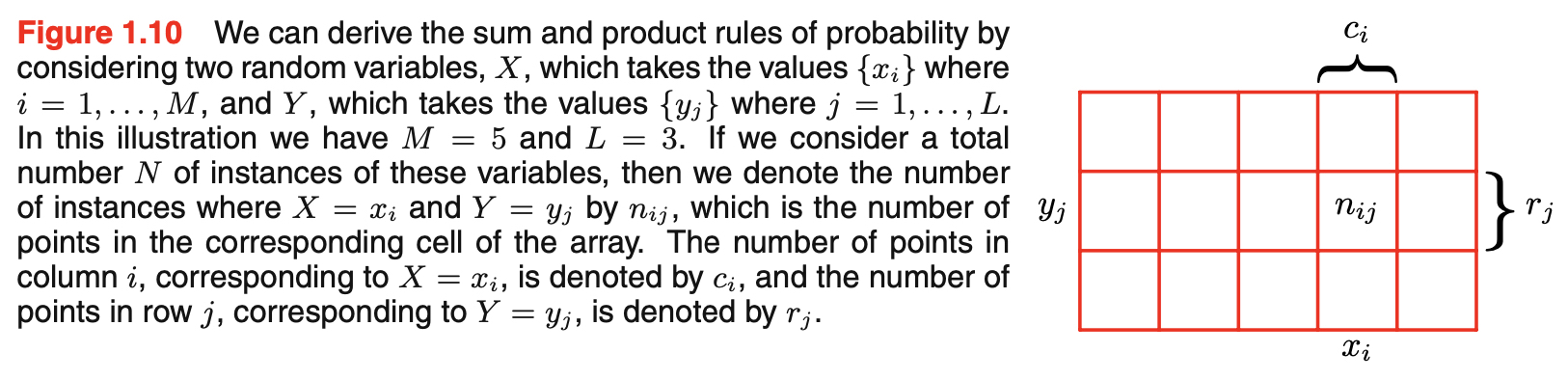
- in order to derive these rules of probability, we will consider more general example involving two random variables $X$ and $Y$
- X can take any values $x_i, i = 1, …, M$
- Y can taky any values $y_j, j = 1, …, L$
- a total of $N$ trials in which we sample both of the variables $X$ and $Y$
- $n_{ij}$: number of trials which $X = x_i$ and $Y = y_j$
- $c_i$: number of trials which $X$ takes the value $x_i$ regardless of the value of $Y$
- $r_j$: number of trials which $Y$ takes the value $y_j$ regardless of the value of $X$
- $p(X = x_i, Y = y_j)$: probability that $X = x_i$ and $Y = y_j$
- this is called the joint probability of $X = x_i$ and $Y = y_j$
- the number of points falling in the cell $i,j$ as a fraction of the total number of points
- here, we are implicitly considering the limit $N \rightarrow \infty$
- this is the Frequentist view of probability
- Bayesian perspective about probability will also be introduced later
- $p(X=x_i)$: probability that $X$ takes the value $x_i$ irrespective of the value of Y
- this is called the marginal probability
- the fraction of the total number of points that fall in column $i$
- number of instances in column $i$ in Figure 1.10 is just the sum of the number of instances in each cell of that column
- $c_i = \sum_j n_{ij}$
- therefore following equation can be derived from (1.5) and (1.6)
-
this is the sum rule of probability
-
$p(Y=y_j \vert X=x_i)$: probability of $P(Y=y_j)$ when the value of $X$ is given as $X=x_i$
- this is called the conditional probability of $Y = y_j$ given $X=x_i$
- the fraction of the point in column $i$ that fall in cell $i,j$
- from (1.5), (1.6), and (1.8), we can derive the following relationship
-
this is the product rule of probability
-
the rules of probability
- sum rule \(p(X) = \sum_{Y} p(X,Y) \tag{1.10}\)
- product rule \(p(X,Y) = p(Y|X)p(X) \tag{1.11}\)
Bayes’ Theorem
- from the symmetry property of product rule, we can obtain Bayes’ theorem
- symmetry property of product rule
- Bayes’ Themorm
- Bayes’ theorem plays a central role in pattern recognition and machine learning
- Bayes’ theorem can be expressed in terms of quantities appearing in the numerator using the sum rule
- denominator can be seen as the normalization constant
- because the sum of conditional probability must add up to one
- denominator can be seen as the normalization constant
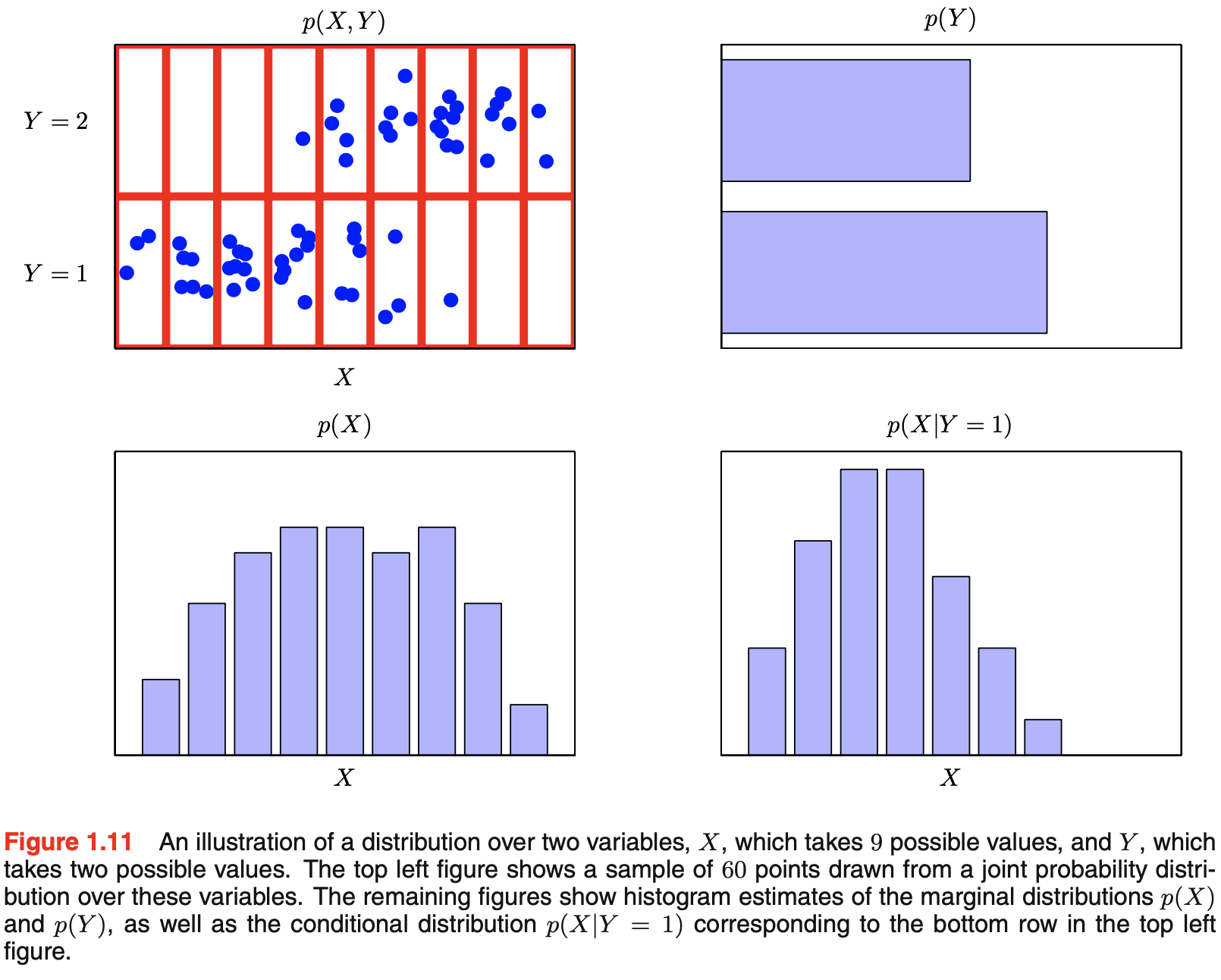
- figure below visualizes joint, marginal, and conditional distributions
- visualization is important part of statisical pattern recognition and will be explored later
Summary with numbers
- going back the the apples and oranges example
- short recap: \(p(B=r) = \frac{4}{10} \tag{1.14}\) \(p(B=b) = \frac{6}{10} \tag{1.15}\)
- conditional probabilities:
- the probability of picking apples in the blue box: \(p(F=a|B=r)= \frac{1}{4} \tag{1.16}\)
- the probability of picking oranges in the blue box: \(p(F=o|B=r)= \frac{3}{4} \tag{1.17}\)
- the probability of picking apples in the red box: \(p(F=a|B=b) = \frac{3}{4} \tag{1.18}\)
- the probability of picking oranges in the blue box: \(p(F=o|B=b) = \frac{1}{$} \tag{1.19}\)
-
note that all possibile events of the given condition must sum up to one \(p(F=a|B=r) + p(F=o|B=r) = 1 \tag{1.20}\) \(p(F=a|B=b) + p(F=o|B=b) = 1 \tag{1.21}\)
- sum and product rules of probability to evaluate the overall probability of choosing an apple
-
using the sum rule, $p(F=o) = 1-\frac{11}{20} = \frac{9}{20}$
-
suppose we are told which fruit has been selected, and it’s orange, and want to find out which box it came from
- we don’t know $p(B=r \vert F=o)$ from the information given
- but we know $p(F=o \vert B=r)$, $p(B=r)$, and $p(F=o)$
- therefore, we can use Bayes’ theorem to find out the answer for $p(B=r \vert F=o)$
- using the Bayes’ theorem, we could make predictions about which box the fruit came from
- before we were told which fruit has been selected, the most complete information we had about box was $p(B)$
- this is called prior probability because it is the probability available before we obtained the data
- after we observed the identity of the fruit, we could update our prior probability with the given data and got $p(B \vert F)$
- this is called posterior probability because it in the probability obtained after we have observed F
- before we were told which fruit has been selected, the most complete information we had about box was $p(B)$
- for this example, the probability of selecting the red box has significantly increased after we observed that the selected fruit is an orange
- this is becuase there were more oranges in the red box than in the blue box
- this concept is very important later since it allows us to update our prediction after we observe data
- nobody wants to make poor guesses forever!
- two variables X and Y are said to be independent if $p(X,Y) = p(X)p(Y)$
- we can prove this from the product rule
- if $p(X,Y) = p(X)p(Y)$, $p(Y \vert X) = p(Y)$
- this means conditional probability of Y given X is independent of the value of X
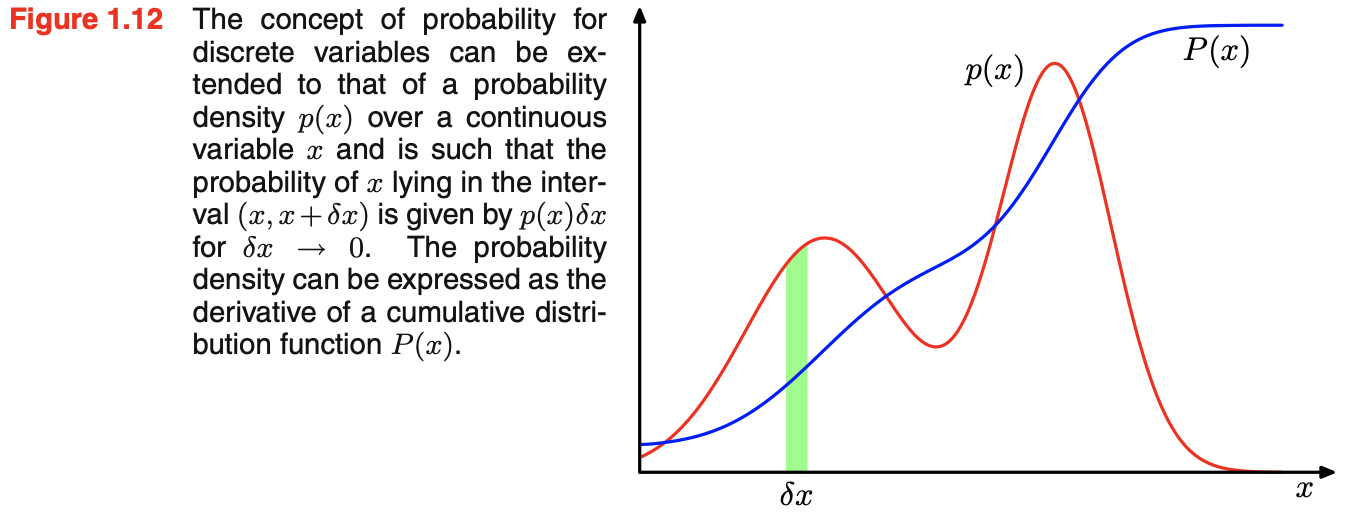
1.2.1 Probability densities
- if the probability of a real-valued variable $x$ falling in the interval $(x, x+ \delta x)$ is given by $p(x)\delta x$ for $\delta x \rightarrow 0$, then $p(x)$ is called the probability density over $x$
- the probability that $x$ will lie in an interval $(a, b)$ is given by the following equation \(p(x \in (a,b)) = \int_a^b p(x)dx \tag{1.24}\)
- probabilities are nonnegative by definition
- the value of $x$ must lie somewhere on the real axis
- therefore, the probability density $p(x)$ must satisfy the two conditions
$\int_{-\infty}^{\infty} p(x) dx = 1 \tag{1.26}$
Change of Variables
- nonlinear change of variables must be processed with special care due to Jacobian factor
- consider a change of variable $x = g(y)$
- then a function $f(x)$ becomes $\tilde{f}(y) = f(g(y))$
- this works the same in probability density
- consider a probability density $p_x(x)$ that corresponds to a density $p_y(y)$ with respect to the new variable y
- observations falling in the range $(x, x + \delta x)$ will, for small values of $\delta x$, be transformed into the range $(y, y+\delta y)$ where $p_x(x)\delta x \simeq p_y(y)\delta y$
- the concept of the maximum of a probability density is dependent on the choice of variable
- the probability that $x$ lies in the interval $(-\infty, z)$ is given by the cumulative distribution function
- satisfy $P’(x) = p(x)$ as shown in Figure 1.12
\(P(z) = \int_{-\infty}^{z} p(x)dx \tag{1.28}\)
- if we have several continuous variable $x_1, …, x_D$, denoted collectively by the vector $\mathbf x$, then we can define a joint probability density $p(x) = p(x_1, …, x_D)$
- the probability of $\mathbf x$ falling in an infinitesimal volume $\delta \mathbf x$ containing the point $\mathbf x$ is given by $p(\mathbf x)\delta \mathbf x$
\(\int p(\mathbf x)d(\mathbf x) = 1 \tag{1.30}\)
- if $x$ is discrete variable, then $p(x)$ is called a probability mass function
- because it can be regarded as a set of ‘probability masses’ concentrated at the allowed values of $x$
- sum and product rules of probability and Bayes’ theorem apply equally to the case of probability densities or to combinations of discrete and continuous variables
1.2.2 Expectations and covariances
- the average value of some function $f(x)$ under a probability distribution $p(x)$ is called the expectation of f(x)
- denoted by $\mathrm E[f]$
- one of the most important operations involving probabilities
- the average is weighted by the relative probabilities of the different values of $x$
- for discrete distribution, expectation is given by
- for continuous variables, expevtations are expressed in terms of an integration with respect to the corresponding probability density
- if we are given a finite number N of points drawn from the probability distribution or probability density, then the expectation can be approximated as a finite sum over these points
- the approximation becomes exact in the limit $N \rightarrow \infty$
- for the case of multiple variables, we can use a subscript to indicate which variable is being averaged over
- this denotes the average of the function $f(x,y)$ with respect to the distribution of $x$
- $E_x[f(x,y)]$ will be a function of y
- conditional expectation with respect to a conditional distribution is analogus with the definition for continuous variables
- the variance of $f(x)$ provides a measure of how much variability there is in $f(x)$ around its mean value $\mathrm E[f(x)]$
- variance can be written in terms of the expectations of $f(x)$ and $f(x)^2$
- we can consider the variance of the variable $x$ itself
- for two random variables x and y, the covariance expresses the extent to which $x$ and $y$ vary together
- if x and y are independent, then their covariance vanishes
- in the case of two vectors of random variable $x$ and $y$, the covariance is a matrix
- $cov[x] \equiv cov[x,x]$
댓글남기기